エネ研流 エコランカーの走らせ方(設計編)
2021年03月05月 執筆 2021年エネルギー研究部ウェブサイト担当大臣
お断りとお願い
この記事は19年のエネルギー研究部の車体設計についてまとめたものです.
筆者は物理が苦手なため,記事にて示した設計方法や計算は間違っている可能性があります.
もし,訂正点などございましたら,メールやTwitterにてご連絡ください.
1.はじめに
2019年度のEne-1GP MOTEGI大会にてエネルギー研究部はKV-BIKE部門にて大学生部門2位という素晴らしい成績を得ることが出来ました.
このような成果を上げることができた背景には,運動方程式を用いた車体設計や計測装置の導入が一番大きな要因になったと考えています.本記事では実際にどのようにしてエコランカーを設計し,走行させたのかを解説していきます.
2.エコランカーの仕様の決定
さて,実際にエコランカーの設計をすると言っても,具体的にどこから初めてどこをどのように設計すれば良いかわからないと思います.自分も大学に入るまでさっぱりでした.まずはどのようなエコランカーを作りたいのか,車体の要求仕様ついて決定していきます.
2.1 要求仕様の決定
2.1.1 巡航速度の決定
始めに,車体が一番効率良く走れる速度,巡航速度について決定します.
本来ならばサーキットの条件などを考慮して考えるべきなのでしょうが,ene-1GP MOTEGIにて走行するスーパースピードウェイのコースはほぼ平面であるため条件を考慮せず,19年の大会では車体の巡航速度=車体の平均速度となるように設計しました.
2018年のene-1GP KV-BIKEのタイムアタック結果表$^{(1)}$よりTOP3位に入賞するには平均速度をどのぐらいにすれば良いのか求めます.リザルトを図1に示します.
|
![図1 2018Ene-1GP MOTEGI KV-BIKE ONE LAPタイムアタック結果表[1]](img/image002.png)
|
|
図1 2018Ene-1GP MOTEGI KV-BIKE ONE LAPタイムアタック結果表$^{(1)}$
|
図1より,TOP3位に入るためにはおよそ5分50秒以内に完走できれば良いことがわかります.
ツインリンクもてぎのスーパースピードウェイの一周の長さは2.414 kmであるため,平均速度$V_a\ [\mathrm{km/h}]$は式(1)となります
|
\[
V_a=\frac{2.414\times{10}^3}{5\times60+50}\times3.6=24.8
\]
|
(1)
|
式(1)より,平均速度がおおよそ25km/hとなるように走行すれば良いことがわかります.
この値より,車体の巡航速度は25km/hと設定しました.
2.1.2 車体の車輪サイズの決定
車体の車輪サイズについて決めます.大会規則の第3章の第1条(1)$^{(2)}$より,車体の車輪サイズは20インチ以上と定められています.
減速比等の関係で車輪は小さい方が良いのでしょうが,19年のエネ研では18年の大会にて使用した自転車を流用したため700C(27インチ相当)としました.18年の車体は先輩方が購入したものなので,この値の決定理由は不明です.
2.1.3 車体重量の決定
次に車体重量について決めます.こちらも大会規則の第1章の第1条$^{(2)}$より,車体重量は15kg以上と定められています.この値丁度に車体を作るというのは不可能であるため,可能であれば軽めに設計し,後から錘で調整した方が良いと思います.19年のエネ研では車体が15kg以下となってしまったため,鉛の錘用いて15kgぴったりになるように調整しました.
2.2 決定した要求仕様
以上より,エコランカーの要求仕様は以下の表1の通りになります.
表1 2019年の車体の仕様
|
項目
|
要求仕様
|
|
巡航速度
|
25 km/h
|
|
平均電流
|
3.55 A
|
|
車輪サイズ
|
700C(27インチ相当)
|
|
車体重量
|
15 kg
|
3. 走行抵抗についての解説
2章で定めた要求仕様よりモータの選定や減速比の決定などの実際の車体の設計を決めていきたいのですが,その前に車体が受ける走行抵抗について解説します.
走行抵抗について理解することによってどのように運転すべきなのか,どのように設計すべきなのかわかるようになります.そんな事良いから早く設計したいという人は4章に飛んでください.
3-1.エコランカーが受ける走行抵抗
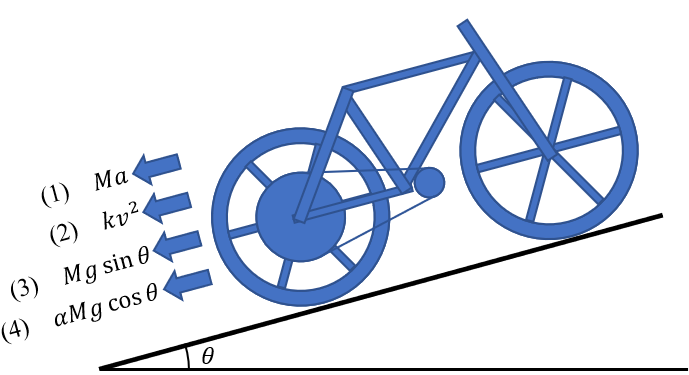
まず,車体が受ける走行抵抗について理解するために,運動方程式とモデル図を用いて解説していきます. 車体の重量を$M \mathrm{[kg]}$,速度を$v \mathrm{[m/s]}$,加速度を$a \mathrm{[m/s^2]}$,勾配を$\theta \mathrm{[\%]}$,車体の受ける総走行抵抗を$R \mathrm{[N]}$としたときの車体の運動方程式を式(2),車体のモデル図を図2に示します$^{(3)}$.
|
\[
R=Ma+{kv}^2+Mg\sin{\theta}+\alpha\ Mg\cos{\theta}
\]
|
(2)
|
|
|
|
図2 車体モデル図
|
式2,図2より,車体には4つの走行抵抗が加わっています.それぞれの走行抵抗について解説します.
3.1.1 加速抵抗について
(1)の項は加速抵抗です.車体が加速するときに生じる走行抵抗を表しています.加速していないときにはこの走行抵抗は加わりません.
このため,加減速を頻繁に行うのではなく,定速走行した方が,加速抵抗が無くなり車体の受ける走行抵抗は少なくなります.
3.1.2 空気抵抗について
(2)の項は車体が受ける空気抵抗を表しています.$ k$は空気抵抗の比例定数です.$ k$は以下の式(3)にて表せます.
|
\[
k=\frac{1}{2}\rho\ C_DA
\]
|
(3)
|
式(3)の$A$は車体の前面投影面積$[\mathrm{m^2}]$,$\rho$は空気密度$[\mathrm{kg/m^3}]$,$C_D$は車体の空気抵抗係数です.
空気抵抗の項において注目すべき点は車体の速度に二乗が掛かっていることです.二乗が掛かっているということは速度が2倍,3倍に増えると空気抵抗は4倍,9倍となります.大会においてはできる限り速度を出したいのにこれは不都合です.そのため,この項における車体の受ける力を低減するには車体の前面投影面積$A$の値と車体の空気抵抗係数$C_D$の値を減らすことが解決策となりえます.
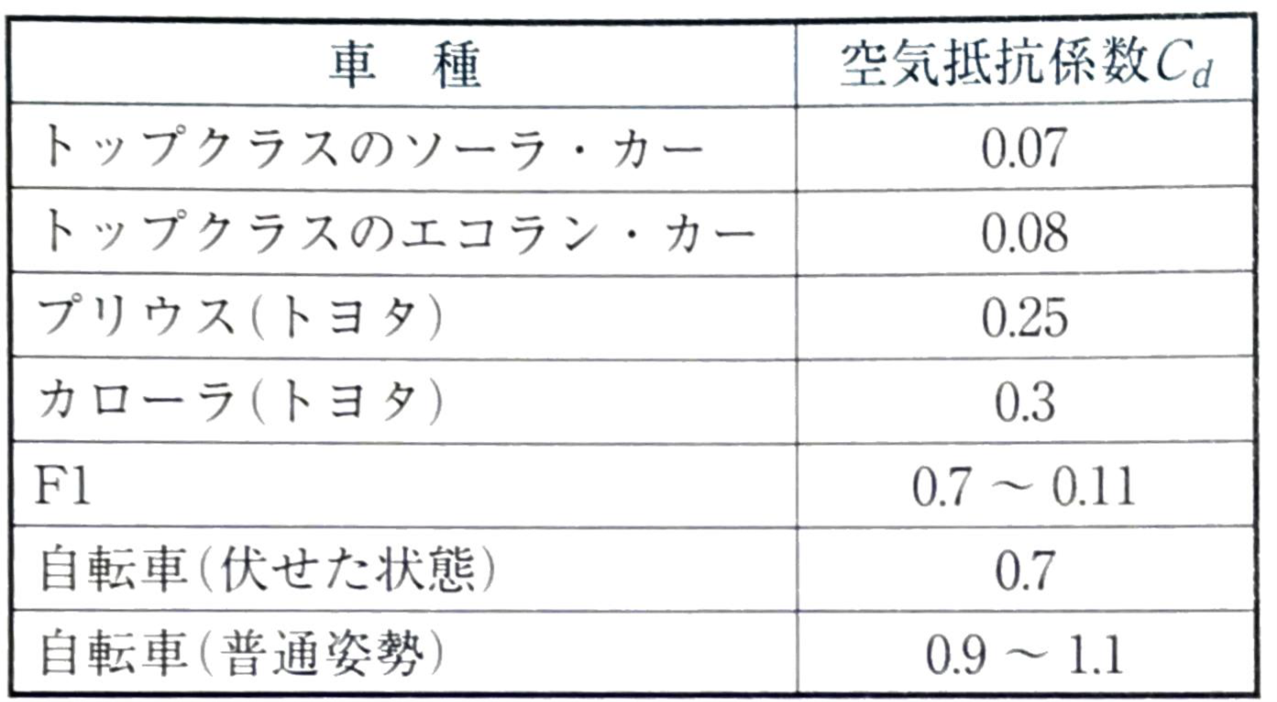
車体の空気抵抗係数$C_D$を求めるには空洞試験などを行う必要があり,学校の設備では測定が難しいためトランジスタ技術2014年11月号$^{(4)}$の値を引用しました.引用した表を表2に示します.
|
表2 乗り物の空気抵抗係数$^{(4)}$
|
|
|
表3より,自転車においては通常姿勢よりも伏せた状態の方が空気抵抗係数の値が小さくなることがわかります.そのため,ドライバーには空気抵抗を減らすために伏せながら運転してもらいました.実際の大会での走行中の写真を図3に示します.
|

|
|
図3 実際の大会での走行中の写真
|
図3に示した通り本当にガッツリ伏せてもらってます.「そんなことしなくても自転車に空力パーツをつければ良いじゃん」って考える人もいると思いますが,悲しいことに空力パーツの使用は大会規則より禁止されています.
表2より,設計では空気抵抗係数を$C_D=0.7$として計算しました.
車体の前面投影面積$A$の値も同様に,ドライバーが伏せるなど自転車の乗り方を工夫することによって値を小さくすることができます.前面投影面積Aと空気密度$ \rho$の値もトランジスタ技術2014年11月号$^{(4)}$の値を引用し,$A=0.4$ $\mathrm{m^2}$,$ \rho=1.15$ $\mathrm{kg/m^3}$として計算しました.
3.1.3 勾配抵抗について
(3)の項は車体が坂道を登った際に受ける走行抵抗である勾配抵抗を表しています.$G$は重力加速度,$ \theta$は坂道の勾配です.
この項における車体の受ける力を低減するには車体の重量$M$を減らす,坂道を避けるべきだということがわかります.
2019年の大会にて走行したツインリンクもてぎのスーパースピードウェイはあまり勾配がない平坦なコースであるため,勾配抵抗はあまり受けていなかったのではないかと考えています.
3.1.4 転がり抵抗について
(4)の項は車体が受ける転がり抵抗を表しています.空気抵抗は車体が高速走行するときに大きくなるのに対して,転がり抵抗は車体が動き始めるときから作用し続けます.
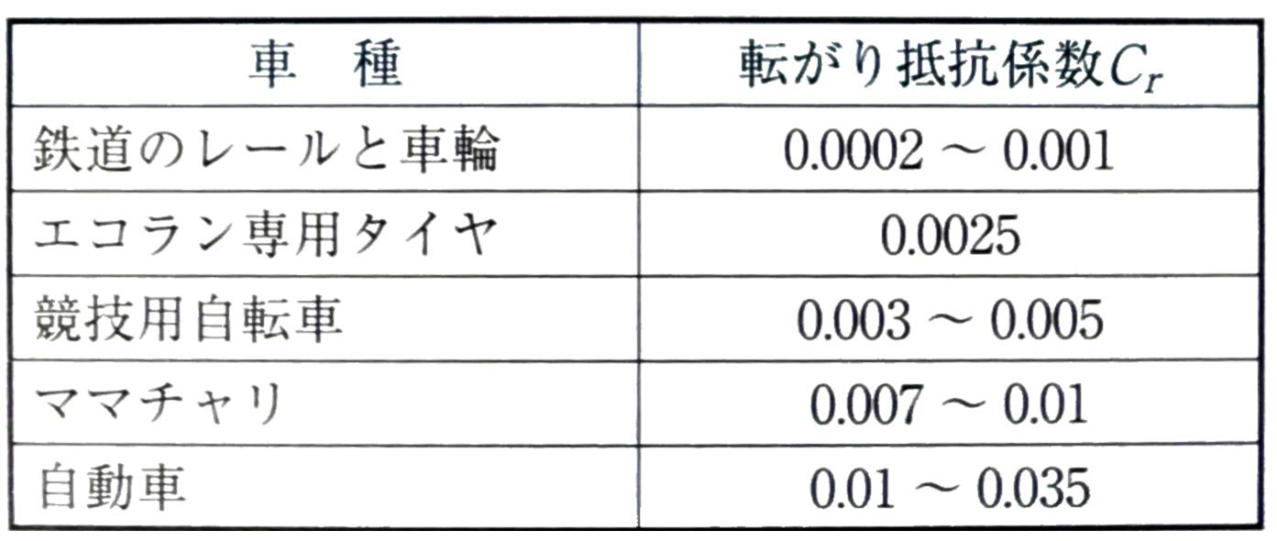
$ \alpha$は転がり抵抗係数です.転がり抵抗係数の値もトランジスタ技術2014年11月号$^{(4)}$の値を引用しました.引用した表を表3に示します.
|
表3 転がり抵抗係数$^{(4)}$
|
|
|
表3より,自転車の転がり抵抗係数はエコラン専用タイヤや競技用自転車の転がり抵抗係数の約4倍の値となっています.このことから,転がり抵抗係数の値を減らすには車体にエコラン用のタイヤを使用する,もしくは競技用のタイヤを使用すると良いことがわかります.
700Cのサイズに適合するエコラン用タイヤは存在しないため,19年のエネ研では自転車に詳しい先輩に頼んで競技用のタイヤを用意してもらいました.表3より,設計では転がり抵抗係数を$ \alpha=0.003$として計算しました.
設計とは関係ないですが,こうやって見ると鉄輪を用いている鉄道の効率の良さが驚異的であることがよくわかりますね.
以上より,車体の受ける4つの走行抵抗について理解できたと思います.次の章にて要求仕様の値を代入し車体の受ける走行抵抗を求めていきます.
4. 実際の設計
3章より,車体が受ける走行抵抗について把握できたと思います.
4章では解説した車体の運動方程式を元に実際の値を代入し,走行時に車体の受ける走行抵抗について求めます.そして求めた走行抵抗からモータの選定や減速比の決定などの実際の車体の設計を行っていきます.
4-1.走行抵抗の計算
走行抵抗について求めます.
平地での巡航時の走行抵抗$ R_c\ [N]$を求めます.式(2),式(3)より,勾配を$ \theta=0\ °$,加速度を$ a=0\ m/s^2$とした時の走行抵抗は式(4)となります.
|
\[
R_c=Ma+{kv}^2+Mg\sin{\theta}+\alpha\ Mg\cos{\theta}
\]
\[
=70\times0+\left(\frac{1}{2}\times1.15\times0.7\times0.4\right)\times\left(25/3.6\right)^2+70\times9.81\times\sin{\left(0\right)}+0.003\times70\times9.81\times\cos{\left(0\right)}
\]
\[
=9.82
\]
|
(4)
|
式(4)より,平地での巡航時の走行抵抗は$ R_c=9.82\ \mathrm{N}$だということがわかりました.
次にこの値より,モータの選定を行うため,必要なモータ出力の値を求めます.
モータ効率を$ \eta_R$としたとき,モータの出力$ W_{out}\ [\mathrm{W}]$は式(5)にて求めることができます$^{(3)}$.
|
\[
W_{out}=\frac{1}{\eta_R}Rv
\]
|
(5)
|
式(4),(5) を用いて巡航時と勾配走行時のモータの出力を求めます.
平地での巡航時のモータの出力$ W_{out_C}\ [\mathrm{W}]$を求めます.式(4),式(5)より,モータ効率を$ \eta_M=0.9$,車体速度を$ v=25\ \mathrm{km/h}$とした時のモータの出力は式(6)となります.
|
\[
W_{out_C}\ =\frac{1}{\eta_M}Rv=\frac{1}{0.9}\times(25/3.6)\times9.82=75.77 \mathrm{W}
\]
|
(6)
|
式(6)より,巡航時のモータの出力は$ W_{out_C}=75.77\ \mathrm{W}$であることがわかりました.
この値より,モータの最高効率時に出力が$75.77\ \mathrm{W}$付近となるモータを選びます.
4.2 モータの選定
実際にモータを選定していきます.
4.2.1 エコランに使われるモータの種類
選定を行う前にエコランに使われるモータの種類と利点欠点について述べていきます.
エコランにて使うモータには大きく分けてダイレクトドライブモータ(以下DDモータ)とダイレクトドライブではないモータ(以下独立型モータ)の2種類存在します.
DDモータとは車輪とモータが一体型となっているモータのことです.エコラン用DDモータの画像を図4に示します.
|

|
|
図4 エコラン用DDモータ$^{(5)}$
|
DDモータの利点としては文字通り減速機を介さずモータの出力で直接タイヤを駆動するため伝達損失が0%となり大変効率が良くなります.また,減速機が存在しないため取り回しも良くなります.
しかし,欠点としてはモータとタイヤが一体型となっているため,後からタイヤのサイズを変更することは困難であり,モータの特性に合わせた車体設計をする必要があります.要求仕様や車体に適合するならばDDモータを選んだほうが良いでしょう.
エコラン用のDDモータではミツバさん$^{(5)}$が販売しています.
独立型モータとは,モータとタイヤが分離しているモータのことです.独立型モータは筆者が解説のために考えた造語です.一般的に通じる言葉があれば教えて下さい.
独立型モータの画像を図5に示します.
|

|
|
図5 エコラン用独立型モータ$^{(7)}$
|
独立型モータは,モータの出力を減速機を介してタイヤを駆動させなければなりません.そのため,伝達損失が生じてしまい,DDモータに比べ効率は落ちます.
利点としてはモータとタイヤが分離しているため,タイヤのサイズや減速比を変えることが可能で,車体をトルク重視や速度重視に設定することが可能です.
エコラン用の独立型モータはミツバさんのキットモータ$^{(6)}$や特殊電装さんのモータ$^{(7)}$などがあります.ミツバさんのキットモータは使用者が自分でコイルを巻いてモータを作る製品のため,自分でモータの特性を変えることができます.
4.2.2 条件に適合するモータの調べ方
ここまで2種類のモータの利点欠点について述べてきました.
2種類の中から最高効率時に出力が$75.77\ \mathrm{W}$付近となるモータを探します.モータの出力を調べるにはモータの特性曲線を見ます.
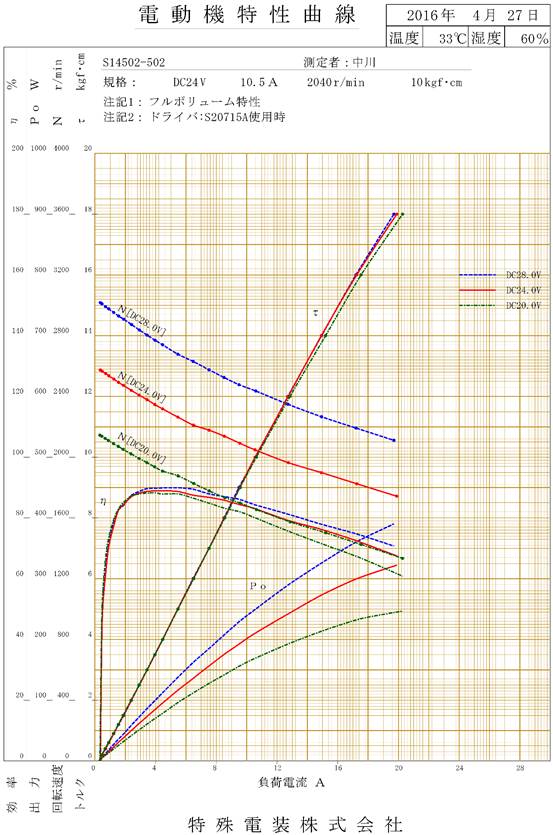
19年の大会で使用した特殊電装さんの独立型モータS14502-502の$24 \mathrm{V}$入力時の特性曲線$^{(8)}$を図6に示します.
|
|
|
図6 $24 \mathrm{V}$入力時のモータ特性曲線$^{(8)}$
|
図6より,モータの出力Poが$75.77\ \mathrm{W}$のとき,モータ効率$ \eta$は最大値付近である89%であることがわかります.このことから,特殊電装さんのS14502-502は条件に適合しているモータだと言えるでしょう.
掲載している画像では見にくいと思うので参考文献よりPDFのデータシートを見てください.
先程のDDモータと独立型モータの解説ではDDモータのほうが利点が多いように感じると思います.
独立型モータを選んだ理由としては,表1の要求仕様に示したように,既に使用する車輪サイズが決まっており,700CサイズのDDモータが存在しなかったためです.
また,候補にミツバさんのキットモータもありましたが,19年の大会ではモータを製作する時間はないと判断しました.そのため,コイルを巻く必要がない既製品のモータを選びました.
4.3 減速比の決定
モータの選定ができたので次にタイヤの駆動力とモータの駆動力から,減速機の減速比を決定します.
始めに,式(4)にて求めた,巡航時に走行抵抗より,タイヤの駆動力を求めます.タイヤの直径を$d\ [\mathrm{m}]$としたとき,タイヤの駆動力$T_{T\ }[\mathrm{Nm}]$は式(7)にて求めることができます.
|
\[
T_T=\frac{d}{2}R
\]
|
(7)
|
700Cのタイヤの円周は2130 mm$^{(9)}$であるため,タイヤの直径$d$は式(8)にて求めることができます.
|
\[
d=\frac{2130\times{10}^3}{\pi}=0.678
\]
|
(8)
|
式(7) ,(8)より,タイヤの駆動力$T_T\ [ \mathrm{Nm}]$は式(9)となります.
|
\[
T_T=\frac{0.678}{2}\times9.82=3.33\ \mathrm{Nm}
\]
|
(9)
|
式(7)より,巡航時のタイヤの駆動力は$3.33\ \mathrm{Nm}$であることがわかりました.次にモータの駆動力を求めます.
S14502-502の特性曲線より,出力が$75.77\ \mathrm{W}$のときのモータの駆動力$T_M[\mathrm{Nm}]$を調べます. 図6より,モータの出力Poが$75.77\ \mathrm{W}$のとき,モータの駆動力$ \tau$はおおよそ$3\ \mathrm{kgfcm}$であることがわかります.
駆動力の単位を$ \mathrm{Nm}$にあわせるために単位換算を行います.$ \mathrm{kgf cm}$から$ \mathrm{Nm}$への換算は式(10)にて行うことができます.
|
\[
駆動力[\mathrm{Nm}]=9.81\times{10}^{-2}\times 駆動力[\mathrm{kgf cm}]
\]
|
(10)
|
式(10)より,モータの駆動力を換算すると式(11)となります.
|
\[
9.81\times{10}^{-2}\times3=0.29\ \mathrm{Nm}
\]
|
(11)
|
式(11)より,巡航時のモータの駆動力$T_M\mathrm{[Nm]}$は$0.29\ \mathrm{Nm}$であることがわかりました.
タイヤの駆動力とモータの駆動力の値より,減速比を求めます.減速機の伝達効率を$ \eta_R$としたとき,減速比$ \zeta$は式(12)にて求められます$^{(3)}$.
|
\[
\zeta=\frac{1}{\eta_R}\frac{T_T}{T_M}
\]
|
(12)
|
式(9) ,(11) ,(12)より,伝達効率$ \eta_R=0.9$としたときの減速比は式(13)となります.
|
\[
\zeta=\frac{1}{0.9}\frac{3.33}{0.29}=12.57
\]
|
(13)
|
式(13)より,減速比は12.57にすれば良いことわかります.入手できるスプロケットの関係で減速比は12~13の範囲と設定しました.
4.4 サーキットブレーカの電流値の決定
最後に一つ決めなければいけないことがあります.それはサーキットブレーカの電流値です.
ene-1GPの規則では使用できる電池は充電式EVOLTA 40個と決まっており,この電池を組電池とすることによってバッテリーを構成します.
大会規則$^{(2)}$より,充電池1本に対して$5 \mathrm{A}$のサーキットブレーカを設ければならない決まりがあります.規則をそのまま読むと使用する充電池40本全てにブレーカを設けなければならないのかと思いますが,そうではなく,この文で言う充電池1本は組電池1個のことです.
充電池の組み合わせとサーキットブレーカの電流値の関係は以下の表4となります.
表4 充電池の組み合わせとサーキットブレーカの電流値の関係
|
充電池の組み合わせ
|
電池電圧 $\mathrm{[V]}$
|
規定サーキットブレーカ電流値 $\mathrm{[A]}$
|
|
40直列
|
48
|
5
|
|
20直列 2並列
|
24
|
10
|
|
10直列 4並列
|
12
|
20
|
モータの選定時に電源電圧は$24 \mathrm{V}$と決めたため,表4より,サーキットブレーカの電流値は$10 \mathrm{A}$にすれば良いことがわかります.19年の大会では三菱電機製のサーキットプロテクタ CP-30BAを使用しました.
5.設計によって決定した仕様
以上より要求仕様から実際の車体の設計を行うことができました.
最後に表1に示した要求仕様と設計によって決定した2019年のエコランカーの仕様を表5にまとめます.
表5 2019年のエコランカーの仕様
|
項目
|
値
|
|
要求仕様
|
|
巡航速度
|
$25 \mathrm{km/h}$
|
|
車輪サイズ
|
700C(27インチ相当)
|
|
車体重量
|
$15 \mathrm{kg}$
|
|
設計によって決定した仕様
|
|
巡航時のモータ出力
|
$75.55 \mathrm{W}$
|
|
モータ型番
|
特殊電装製 S14502-502
|
|
減速比
|
$12~13$
|
|
サーキットブレーカ
|
CP-30BA (定格電流$10 \mathrm{A}$)
|
表5より,エコランカーの設計をすることができました.これらの値を元に機械加工などのエコランカーの製作を行っていきます.
製作編へ続く…?
参考文献
(1) Twin Ring MOTEGI Result 2018Ene-1GP MOTEG KV-BIKE ONE LAPタイムアタック結果表:https://www.twinring.jp/result_m/2018/4wheel/1124_kvbike_t.html,閲覧日2021年03月04日12時.
(2) 【2019年版】KV-BIKE チャレンジ 特別規則書:https://www.twinring.jp/ene-1/rule/pdf/2019/kv-bike.pdf,閲覧日2021年03月04日12時.
(3) 松田孟大,涌井正典:” 実践教育ジャーナル 電気自動車のエネルギ効率を力学的な面から考える”,実践教育訓練学会.
(4) トランジスタ技術編集部:“トランジスタ技術 2014年11月号”,CQ出版,pp. 69,pp.40,pp.57 2018.
(5) ミツバSCR+ プロジェクト|株式会社ミツバ 製品情報:https://www.mitsuba.co.jp/scr/products,閲覧日2021年03月04日13時.
(6) CQブラシレス・モータ&インバータ・キット 標準セット版:https://shop.cqpub.co.jp/hanbai/books/I/I000055.html,閲覧日2021年03月04日13時.
(7) Zero to Darwin ZDPSHOP S14502-502(Ene-1用ブラシレスモーター):http://zdpshop.shop23.makeshop.jp/shopdetail/000000000139/ct14/page1/order/,閲覧日2021年03月04日13時.
(8) S14502-50_Optimized:https://gigaplus.makeshop.jp/zdpshop/motor/502/S14502-502_Optimized.pdf,閲覧日2021年03月04日13時.
(9) タイヤ周長ガイド - CATEYE:https://www.cateye.com/files/manual_dl/1/129/Tire_size_chart_JP_151023.pdf,閲覧日2021年03月04日14時.
トップへ戻る